| 提交詢價信息 |
| 發(fā)布緊急求購 |





價格:電議
所在地:山東 濟(jì)南市
型號:XKCON
更新時間:2024-02-19
瀏覽次數(shù):1426
公司地址:山東省濟(jì)南市高新區(qū)
![]()
張經(jīng)理(先生)
目前斗輪機(jī)位置檢測大多采用的是人眼定位、激光位移傳感器、行走限位開關(guān)、RFID 方式、加裝
刻度標(biāo)尺定位系統(tǒng)的檢測技術(shù)。
以上幾種位置檢測方式均存在一定的缺陷,具體表現(xiàn)為:
? 人眼定位受制于眼睛健康狀況和精神狀態(tài),環(huán)境影響比較大,作業(yè)時間長;
? 激光位移傳感器在不潔凈環(huán)境會失去作用,軌道沉降導(dǎo)致車輛走行抖動會使反光
板靶位不準(zhǔn),亦會導(dǎo)致位置檢測不準(zhǔn);
? 行走限位開關(guān)由于是點(diǎn)定位,對連續(xù)性位置檢測存在盲區(qū);
? RFID 方式是無線點(diǎn)定位,存在漏讀現(xiàn)象, 延時較大;
? 加裝刻度條方式成本高,安裝復(fù)雜,在現(xiàn)場惡劣的環(huán)境下容易磨損。
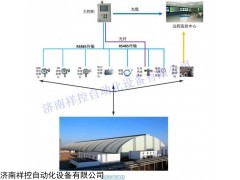
1. 封閉煤場內(nèi)部斗輪機(jī)定位解決方案
斗輪機(jī)在封閉煤場內(nèi)部無法采用衛(wèi)星定位技術(shù),基于室內(nèi)的各種定位技術(shù)中目前精度成
熟的為 UWB 定位技術(shù)。UWB 無線定位的一般精度為 10cm,精度可達(dá)到 5cm 以內(nèi)。
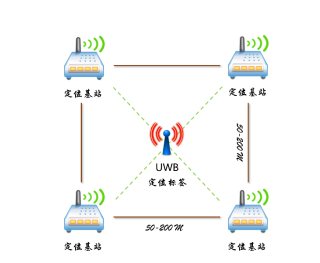
UWB 無線定位原理:無線基站位置已知,標(biāo)簽發(fā)出無線脈沖信號,根據(jù)標(biāo)簽到達(dá)每個基站的時間
乘以光速,得到標(biāo)簽至每個基站的距離,再通過算法求解,終得到標(biāo)簽的位置,從而實(shí)現(xiàn)標(biāo)簽定
位。
2. 露天煤場斗輪機(jī)定位解決方案
露天煤場斗輪機(jī)主要采用差分基站定位技術(shù),利用基于載波相位觀測值的實(shí)時動態(tài)定位(RTK)
技術(shù),能夠?qū)崟r地提供測站點(diǎn)在坐標(biāo)系中的三維定位結(jié)果,并達(dá)到厘米級精度。在 RTK 作業(yè)模式
下,基準(zhǔn)站通過數(shù)據(jù)鏈將其觀測值和測站坐標(biāo)信息一起傳送給流動站。流動站不僅通過數(shù)據(jù)鏈接收來
自基準(zhǔn)站的數(shù)據(jù),還要采集北斗/GPS 觀測數(shù)據(jù),并在系統(tǒng)內(nèi)組成差分觀測值進(jìn)行實(shí)時處理,同時給
出厘米級定位結(jié)果。 免責(zé)聲明:以上所展示的[XKCON 斗輪機(jī)定位系統(tǒng)]信息由會員[濟(jì)南祥控自動化設(shè)備有限公司]自行提供,內(nèi)容的真實(shí)性、準(zhǔn)確性和合法性由發(fā)布會員負(fù)責(zé)。
免責(zé)聲明:以上所展示的[XKCON 斗輪機(jī)定位系統(tǒng)]信息由會員[濟(jì)南祥控自動化設(shè)備有限公司]自行提供,內(nèi)容的真實(shí)性、準(zhǔn)確性和合法性由發(fā)布會員負(fù)責(zé)。